 登入
登入Taiwan car lab
connected,
autonomous,
road-test
connected,
autonomous,
road-test

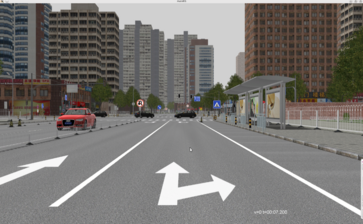
自駕車虛擬模擬平台

資料彙整應用平台

交通情境之實測場域
 關於臺灣智駕測試實驗室
關於臺灣智駕測試實驗室
臺灣智駕測試實驗室由財團法人國家實驗研究院團隊負責營運規劃與研發服務平台建置,工作團隊包含國研院院部沙崙智駕場域營運組,並結合國研院院本部、國網中心、半導體中心及儀科中心等研發能量,主要負責智駕測試實驗室計畫執行與營運規劃、智駕測試資料庫建置維運、測試影像自動化判釋技術研發、虛擬模擬技術研發等工作,此外,本實驗室亦與經濟部財團法人車輛研究測試中心合作,引進車輛中心長期於車輛測試領域及自駕車研發之能量,共同研發國內自駕車、先進ADAS系統、車聯網、資安等測試技術,並希望藉由系統性的測試結果與數據,形成國內單位建立未來自駕車與車聯網相關標準與規範之建議。

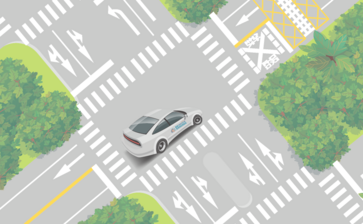
道路測試
詳細的路面設計、規劃,針對自駕車的乘適性能提供準確的實測數據。
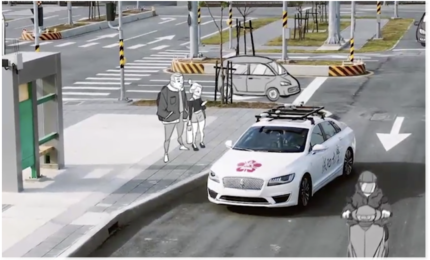
路況模擬
為模擬國內道路之行駛情境,設計15項路況實測,
評估自駕車的環境應變能力。

虛擬平台
支援大量調度節點與GPU之運算效能,提供自駕車虛擬運算平台建置的資源環境。
Events

系列活動
開放報名中
發布日期: 2024-04-24
無人載具科技創新實驗計畫暨無人載具科技實證運行補助計畫推廣說明會(實體暨線上)
系列活動
開放報名中
發布日期: 2024-04-18
「科技沙崙 四百臺南 世界台灣」4/27-4/29盛大舉行

系列活動
開放報名中
發布日期: 2024-04-02
SGS 電動車供應鏈資安防禦研討會
單場活動
發布日期: 2023-12-22
2023臺灣智駕測試實驗室成果發表會

單場活動
發布日期: 2022-12-12
2022臺灣智駕測試實驗室成果發表會
單場活動
發布日期: 2021-12-15
2021臺灣智駕測試實驗室成果發表會
單場活動
發布日期: 2021-08-24
VTD系統培育自駕人才新方案 PHASE1

單場活動
發布日期: 2020-12-28