Member
MemberVirtual Platform
With simulated tests for self-driving vehicles built on virtual computing platforms (full-vehicle mobility, environment, sensors and signals), there is a significant demand for computing power. In response, Taiwan Computing Cloud (TWCC), under the National Center for High-Performance Computing, integrated the latest container-based virtualization techniques, high capacity dispatch nodes, and graphics processing units to provide the resources and environment for building a virtual computing platform for self-driving vehicles. Hexagon Virtual Test Drive (VTD), a virtual software for testing self-driving vehicles, was built to support this program. Its cloud platform, which is installed on TWCC’s Taiwania 1 service platform, includes a software service manual and a database covering eight types of common traffic accidents in Taiwan. Hexagon VTD is available for use by external academic and research organizations. In the future, simulation software for virtual testing of self-driving vehicles will be combined with domestic research results to build a virtual simulation R&D service platform that is based on local traffic conditions in Taiwan.

Advances in 2020 included new equipment to support a self-driving simulation environment in the intelligent driving laboratory and expansion of the experimental setting and testing environment based on results from 2019. The updated program better represents traffic conditions in Taiwan.
(1) New Equipment to Support the Self-Driving Simulation Environment in the Intelligent Driving Laboratory
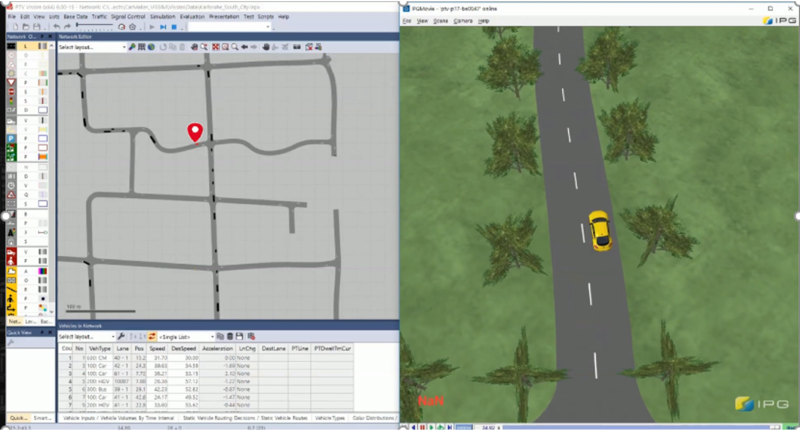
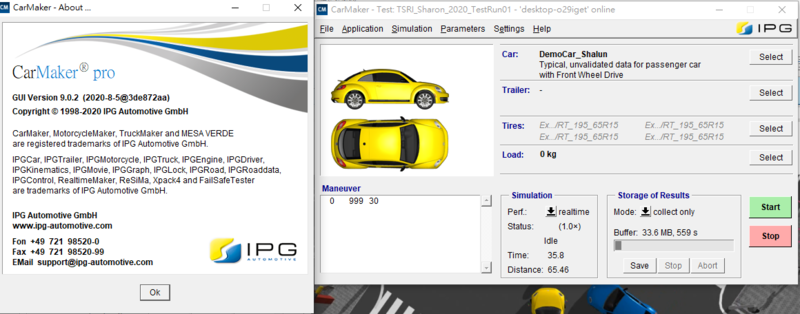
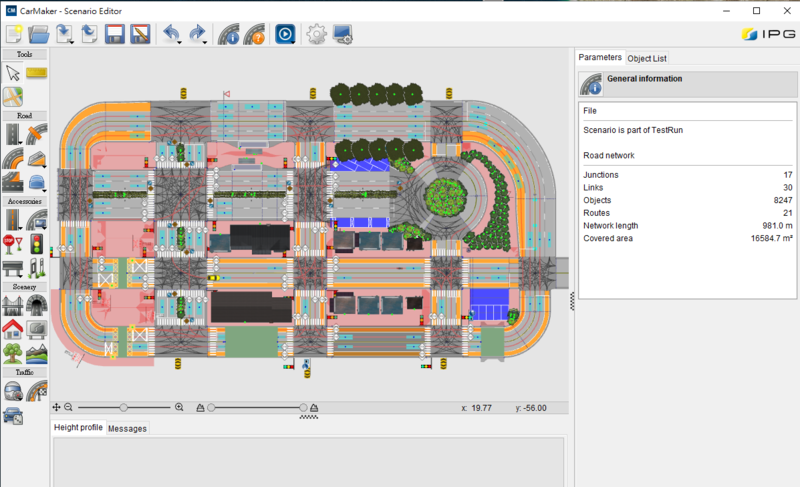
Purchased the commercial use version of the IPG Automotive-CarMaker HIL/Pro simulation software, which can be used by academic and business organizations. The program uses CarMaker software in conjunction with the intelligent driving laboratory site and six testing routes, as shown in Figures.
(2) Building 3D Models for Scooters, Medium-Sized Buses, and Common Traffic Signs in Taiwan
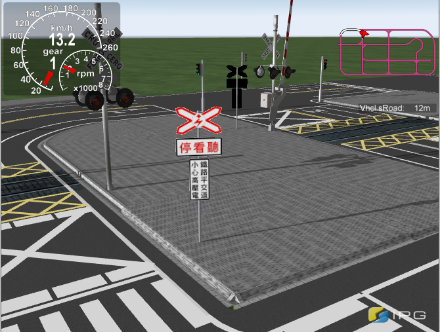
Since the self-driving simulation environment was based on the CarMaker simulation software made by the German company IPG Automotive, it primarily used vehicles and traffic signs commonly seen in Europe. In order to localize the simulation environment so that it better fits Taiwan user needs, programmers added scooters, medium-sized buses, and Taiwan traffic signs. Figures show these models and how they were integrated into the CarMaker software.





(3) Expansion of the Testing Environment for 10 Types of Small Passenger Vehicle Accidents
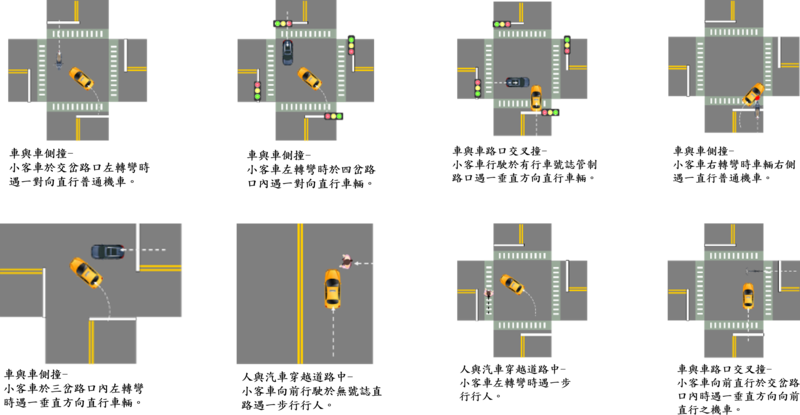
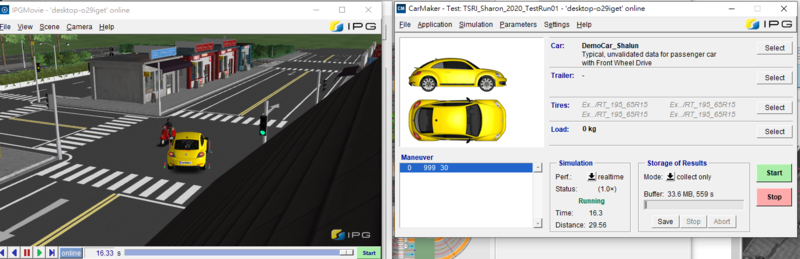
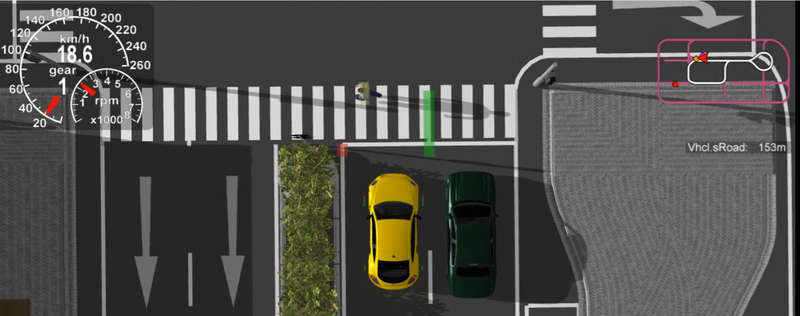
To bring Taiwan-traffic characteristics to the self-driving simulation environment, programmers analyzed statistics describing the most common types of local traffic accidents then used their findings to add 10 types of small passenger vehicle accidents to the testing environment. The accident types are listed below and scenes from the CarMaker software are shown in Figure.
A. Side impact involving scooters at intersections containing traffic lights.
B. Side impact involving scooters at four-way intersections.
C. Side impact involving scooters at three-way intersections.
D. Collisions in fast lanes involving vehicles traveling in the same direction.
E. Collisions in traffic circles involving vehicles traveling in the same direction.
F. Accidents in bus lanes involving side impact between small passenger vehicles and scooters.
G. Left-turning vehicles that strike pedestrians in the crosswalk.
H. Collisions with oncoming traffic on curved roads.
I. Collisions between vehicles traveling in the same direction in tunnels.
J. Small passenger vehicles illegal trying to cross ahead of the train at level crossings.









(4) Expansion of the Testing Environment to Suit Taiwan’s Climate
To bring Taiwan’s diverse climate characteristics to the self-driving simulation environment, programmers completed expansion of the testing environment this year to include clear skies, dark nights, fog, and clouds, as well as light and shadow variations. Figure shows scenes from the program.




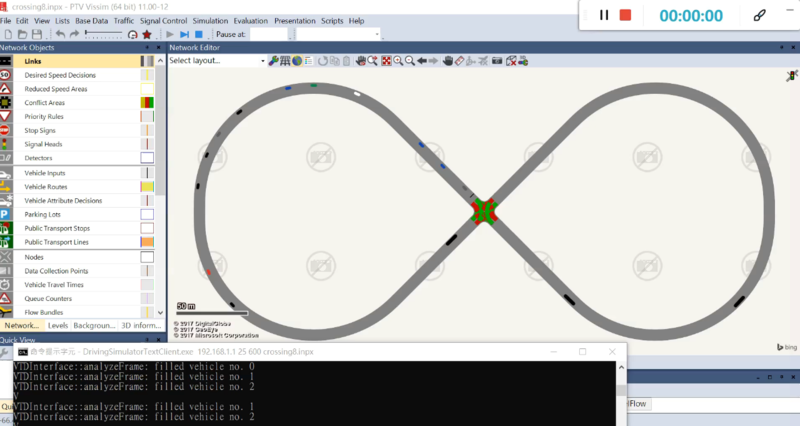
(5) Establishment of the Cross-Platform Automobile & Scooter Mixed Module
Another addition to the program this year was an automobile & scooter mixed module that works with Taiwan CAR Lab’s CarMaker and VTD simulated environment. Taiwan CAR Lab will use the module to introduce automobile & scooter mixed traffic to simulation environments. Findings can be shared with testing sites. The module brings greater diversity to virtual system testing and makes the tests more realistic. It reduces the initial technical development threshold for domestic academic researchers and enterprises, which can accelerate the industrial technical R&D process.